Laurman, heli mõttes oleks vist hammastega parem aga iseenesest sobiks ka sile.
Mul on oluline see, et ta suudaks rihma paigal hoida. Mul jookseb rihma praegu niisama laagri peal ja vahest kipub see sealt natuke kõrvale kalduma ja vastu hoidiku seina nühkima.
T-Nut mutreid teen ise...pooleldi ise. Kohtadesse kus tihti kinni-lahti keeramist pole saab kasutada just neid. Peab jah otsast sisse lükkama, aga ühekordne vaev. Ainuke jama on et mul jälle M4 mutrid otsas. _________________ möhhh..
Trwind55, see on ju täitsa kaval mõte. Peaks ka korra proovima.
jt234, tänud! 8,5mm peaks mul veel nibin-nabin sinna ära mahtuma.
Pidin Laurman'iga kaupa tegema aga pole õnnestunud veel trehvata. Jätan Sinu pakkumise praegu plaan 'B'ks.
Põhimõtteliselt tegu jah ühe masina korpuse/kattega. Tehti pakkumine lihtsa plastkäraka eest 150€ maksta mis on üle mõistuse. Aga jah, võibolla vaatab ehk annab kasvõi veekindlast vineerist midagi kompunnida kui ühes tükis teha ei anna.
See 150 pole prinditud jupp vaid otse tootjalt plastkaas lihtsalt (ilmselt vormiga valatud). Kuna tegu "nišitootega" ja keegi alternatiive ei paku, siis saabki hinna nii kõrgeks ajada- kui vaja, siis maksad. Kuna 3d printmisest midagi ei jaga, siis mõtlesingi uurida kuidas siin asjad käivad.
Hinna muudab eriti naeruväärseks see, et hiljuti vahetasin autol paar plastist keredetaili ja nende kõikide hind jäi sellele alla
Kas keegi oskab kiirelt aidata. 2 printerit ja mõlemad otsustasid täna 10 min vahedega lepingud lõpetada. Ühel vaja termistori aga Isetgijal laost otsas NTC3950. Oomipoest ka ei leidnud midagi. Oskab keegi öelda kuskohast veel vaadata sest vaja oleks suht kohe?
Teisel masinal viskas ekraan ennast pimedaks, panin OFF ja uuesti ON, korraks võttis pildi ette ja siis lükkas jälle välja. 3-s kord jäi lõplikult pimedaks. Kahtlustasin toiteplokki aga indikaatoriga näitab, et vool jookseb toiteplokist boardile, iseküsimus mis sorti vool. Mootoreid liigutades lööb ekraani helendama ja ventilaatori tööle, ju siis board küpse pole. Kuhu võiks viia kontrolli? Kas IT buss või on veel kedagi/midagi?
Homme vaatan, vist oli termistor varuks pandud.
Teise printeri elektroonika saan ka uurida.
Tallinnas-Mustamäel ja Laagris. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
m.han, ekraan lööb mootorite liigutamisel helendama sellepärast, et mootorid genereerivad voolu. Aga ära sa neid mootoreid käsitsi väga liiguta kui sul just draiveritel protectoreid vahel ei ole. Väga lihtne on draivereid sedasi läbi kärsatada.
m.han, ekraan lööb mootorite liigutamisel helendama sellepärast, et mootorid genereerivad voolu. Aga ära sa neid mootoreid käsitsi väga liiguta kui sul just draiveritel protectoreid vahel ei ole. Väga lihtne on draivereid sedasi läbi kärsatada.
Peaks olema vahel. Tegu on DeltaWASP 2040 masinaga ja siiani pole see liigutamine midagi muutnud.
Ega kellelgi pole kuhugi sahtli/kastinurka jäänud vedelema mõnda "õhukest" mootorit? A'la nagu Titan'il jms uhkematel ekstruuderitel kasutatakse.
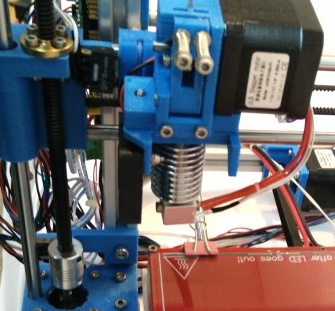
Hakkasin eile omale BLTouch'i kompatiiblit pea kinnitust joonistama ja vaatasin, et praegu ekstruuderi küljes olev "suur" mootor on ikka rämedalt raske. Mõtlesin, et optimeeriks natuke ja vahetakse selle millegi vähe kergema vastu. Seal ei ole ju mingit meeletut jõudu vaja. Saaks pea kergemaks ja sellega ka vibratsiooni vähemaks. Või mu mõte ei päde?
warwas, kui sul on direct extruder, ehk otse mootori võllil on filamenti suruv hammakas, siis on päris arvestatavat jõudu vaja. Kui on ülekandega, siis on teine teema.
warwas, selle pildi järgi näen, et sul hammakas otse võllil:
Siis nagu raitl ütles, väga lahja mootoriga jääd hätta. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
On jah otse võllil. Päris hammakas ei ole. Võlli peal on mingi selline kareda soonega jubin ja siis materjal jookseb selle ja kuullaagri vahelt läbi. Aga jah, mõte jääb samaks.
Selge. Tänud kaasa mõtlemast. Kratsin selle plaani maha.
EDIT:
Mida te muidu praktikas näinud olete, kui suurt kasu kergemast trükipeast lõigata annaks? Just vibratsiooni ja ghostingu osas.
Bowdenit ei taha, pigem midagi a'la Titan vms. Titani puhul saaks nii kergema pannkookmootori kui ka ülekande. Ülekande kasutamise mõte oleks siis mis? Saada väiksest mootorist rohkem väänet või hoopis täpsemat doseerimist?
Ikka peaks olema mootoril piisavalt jõudu, et filamendi trükipeast läbi suruda. Selleks vaja siis kas piisavalt võimsa mootori või ülekannet.
Pigem mõtleks selle peale, kui hull see ghosting on, kas seda saab vähendada madalama kiirusega, printeri kinnitamisega, raami tugevdamisega jne... Ehk asi pole ainult trükipea massis. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
Ma siin mingi aeg tagasi avasin kogemata uue "pandoora laeka", kui lasin testiks ühe selle XYZ kuubiku välja. Veits ikka lainetas. X'i peal rohkem, Y'i peal vähem.
Võib-olla pole üldse midagi katastroofilist aga kuna kogemust vähe ja võrdlusmaterjali mõne vingema masinaga pole, siis ei teagi hetkel, mida sellest arvata.
Eile tegin veel natuke katsetusi. Proovisin Cura's neid Jerk ja Accelaration Control linnukesi aga vahet polnud nagu üldse. 30mm/s vs 40mm/s nägi ka põhim. sama välja.
Kui õhtul meeles seisab, siis teen ehk mõne pildi sellest.
Üritan selle uue hotendi kinituse nüüd vähe toekama teha, kui see originaal. Kohati tekib tunne nagu oleks seal mingi väike loks sees. Kõva tõmblemisega võtab äkki pritsile ka väikese vibra sisse.
Õnneks oluliste detailide (e. väljaspool testimist) pole see väga häirinud. Lihtsalt süües kasvab isu
Omal ajal piirdusin lihtsalt mingi hetk rahuldava kvaliteediga ja punkt. Minu jaoks pole mõtet timmida lahja ja odava masina, et saada kalli ja kvaliteetse masina tulemust. Sest see läheb kokkuvõttes maksna pea sama palju, kui see kallima otsa masin ise. Ainult, et kulutad aega, raha ja närve rohkem...
Peaksid endale selgeks tegema, mida sa tahad sellest masinast saada.
Edasi-tagasi liikuva lauaga masinast ei saagi sama kvaliteedi, mis on masinal, kus laud sõidab ainult üles-alla, ja ka sellega ei saa sama kvaliteedi, mida annab Delta printeritega jne... Rääkimata juba SLA printeritest. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
maxfox04, ei ootagi mossest Audi kvaliteeti. Mind lihtsalt huvitab see, kust kohast see piir läheb. Mida on vaja teha, et olemasolevast rauast (koos mõningate täiendustega) maksimum välja võtta.
Kuna see masin saigi ligi võetud just enese harimise eesmärgiga, siis kulutatud aeg ja närvid väga pilli ei puhu.
Üleüldiselt olen ma suht-koht rahul. Vaadates mõningaid Thingiverse'i näidistrükke, siis ütleks, et minu masin teeb ikka suht viisakat tööd.
Joonistasin ja printisin nädalavahetusel uue pea kinnituse valmis ja eile õhta siis uurisin seda 3DTouch'i. Üritasin kalibreerida aga näen midagi imelikku:
Kui kõvasti sul alus pingutatud on "sirge" olemise jaoks. Seda vaadates tekib tunne, et sul paindub alusplaat ise läbi. Lase ta vähe haaval lõdvemaks ja vaata kas pilt muutub.
Diagnoosimiseks tõmbaks probemise kiirust maha ja lisaks selle, et igat punkti mõõdetakse vähemalt 2x. Tasuks võib olla gridi ka suurendada natuke, et saada selgem pilt.
PS: Kas antud tulemused on külma bediga? _________________
Üleeile tegin teste nii soojalt kui külmalt. Kalde muutumine juhtus mõlemal juhul. Hetkel ei mäleta, kummast testist need siia pastetud numbrid olid (vist soojast).
Jah, aluse üks nurk (all paremal või ees paremal, kuidas vaadata) on küll veidike all. Pikas perspektiivis oleks sinna midagi paksemat vaja, pole lihtsalt materjali veel leidnud. Eks ma proovin seda korra natuke väänata.
Samas see ei tohiks antud anomaalia juures ju pilli puhuda, sest all on ainult üks nurk aga mõõdistus näitab, et alus on viltu terves ulatuses.
Eilne õhtu läks kahjuks muude toimetuste nahka ja printeriga ei jõudnud väga toimetada. M48 jõudsin aga sisse lülitada ja ühe lühikese testi isegi teha. Kümme pauku keset alust andis veaks 0.004. Tundub, et sond ise segast ei pane.
Üritan täna õhtul terve aluse läbi koputada. Saab ehk pildi selgemaks.
Mingi veidrus on aga mul seal veel sees - ta nagu ignoreeriks täielikult Z_PROBE_OFFSET_FROM_EXTRUDER väärtust. Ükskõik, mis seal kirjas ei oleks, alati jääb düüs ~1mm kõrgusele.
Kuidas toimetasin:
* Sättisin sondi korpuse alumise osa 8,5mm kaugusele düüsi otsast (tõsi, mingid juhendid ütlevad ka 8,3mm aga hetkel on mul viga suurem, kui see 0,2mm)
* Pea koju (G28)
* Aluse kaardistamine (G29)
* Pea keset alust (G1 X100 Y100)
* Kruttisin düüsi nii madalaks, et paber mahtus veel vahele
* M114 andis Z'i hetke väärtuse (midagi a'la -0.9)
* Kirjutasin selle Z_PROBE_OFFSET_FROM_EXTRUDER väärtuseks
* Kompileerimine ja uus soft Arduinosse
* Jälle sama G28 ja G29 tsükkel
* Pea keset alust (G1 X100 Y100 Z0)
Pea peaks ju nüüd olema sellel samal paberilehe kõrgusel aga reaalsuses saan ma pead jälle umbes millimeetri alla kruttida.
Kas ma teen midagi valesti?
Täheldasin veel seda, et kui seda offsetti määrata LCD pealt, siis sellega ta nagu arvestaks.
...
Pea peaks ju nüüd olema sellel samal paberilehe kõrgusel aga reaalsuses saan ma pead jälle umbes millimeetri alla kruttida.
Kas ma teen midagi valesti?
Täheldasin veel seda, et kui seda offsetti määrata LCD pealt, siis sellega ta nagu arvestaks.
Ega ta jummala pärast neid andmeid EEPROMi ei kirjuta?
Selliste asjadega pidavalt alt mindud. Need firmware confi asjad ju loetakse EEPROMI väärtustega üle
...
Pea peaks ju nüüd olema sellel samal paberilehe kõrgusel aga reaalsuses saan ma pead jälle umbes millimeetri alla kruttida.
Kas ma teen midagi valesti?
Täheldasin veel seda, et kui seda offsetti määrata LCD pealt, siis sellega ta nagu arvestaks.
Ega ta jummala pärast neid andmeid EEPROMi ei kirjuta?
Selliste asjadega pidavalt alt mindud. Need firmware confi asjad ju loetakse EEPROMI väärtustega üle
EEPROM'i kirjutamiseks on seal täiesti eraldi menüüvalik. Niisama krutitud väärtused peaksid olema aktuaalsed kuni restardini.
Kontrollin selle hetkel mälus oleva väärtuse üle.
Aga kui ma menüüst sätin offseti nulli ja salvestan ära, siis mis käivitamisel juhtub - kas ta ignoreerib seda väärtust või loebki ta sealt välja, et offset on null ja ignob seda, mis ma talle algesse koodi kirjutasin.
Oletame, et ta jääbki mul seda koodis olevat väärtust ingoreerima, siis ideeliselt ma vist ju võikski siis seda EEPROM'i varianti siis kasutama jäädagi. Lõpptulemus peaks ju samaväärne olema?
Leidsin üles need videod, mille järgi kunagi ammu esimene setup tehtud sai, need olid kõige konkreetsemad. Äkki sinul ka kasu.
Viimane vist isegi olulisem, sest sul seadistus suuresti tehtud ja vaja vaid kalbireerida.
PS: Mingi hetk jamades alusplaadi kõverustega viskasin klaasi peale plaadile, ilma et oleks kinni pingutanud. Tulemused olid kohe ilusamad. _________________
...
Aga kui ma menüüst sätin offseti nulli ja salvestan ära, siis mis käivitamisel juhtub - kas ta ignoreerib seda väärtust või loebki ta sealt välja, et offset on null ja ignob seda, mis ma talle algesse koodi kirjutasin.
Oletame, et ta jääbki mul seda koodis olevat väärtust ingoreerima, siis ideeliselt ma vist ju võikski siis seda EEPROM'i varianti siis kasutama jäädagi. Lõpptulemus peaks ju samaväärne olema?
Nii on EEPROMi salvestamine on ekraaniga printeritel kõige mugavam meetod parameetrite sättimiseks.
Sain siin nüüd aluse enam-vähem "loodi" ja tegin esimest testprinti kui järsku Y mootor enam ei liikunud. Katkestasin trüki mõtlesin, et "Ok, tehnikasport, ikka juhtub". Panin uuesti käima ja samal ajal, kui alus ja pea soojenesid, tundsin järsku "lahkuva maagia lõhna". Saba kiirelt seinast ja pärast pöidla ära kõrvetamist sai selgeks Q3 (ehk siis see väljakas, millest aluse soojendus läbi käib) on nii tuliseks läinud, et võttis lausa tina sulama.
Kui alus küljest ära võtta, siis tuliseks ei lähe aga väljundis on 12V ilusti olemas. LED2 põleb ka. Ei ole veel skeemi süvenenud aga miskipärast on Q3 nüüd permanentselt "ühendatud". Ka ilma Arduinota.
Y draiver läheb ka nii soojaks, et radikas kukub pealt ära. Kas siin tasuks väljaka suremisega mingit seost otsida? Ei tundu väga loogiline.
Hästi kiirelt proovides mootor ka ei liigu. Mootor ise on aga korras (tõstsin prooviks teise draiveri taha).
Lugesin siin RAMPS'i dokumentatsiooni natuke ja seal oli lausa kirjas, et aluse jaoks tasuks vähe kangemad transid panna. Hiinlane aga ilmselgelt ökonoomitas jälle. Ma juba päris alguses imestasin, et kuidas need seal ilma radikata vastu peavad.
Saan sulle transi ära vahetada, kui soovid. Samuti on paar mootori driveri ka varustatud, mis driverid sul on?
Mootori driveritega peaks kontrollima ka voolu, mis mootoritele antakse. Seda reguleeritakse driveri plaadil oleva potekaga ja vastavalt tabelile. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
pwn13, jep. Aluse toidet lülitava väljatransiga (e mosfet'iga) mul see probleem ongi.
maxfox04, oleks juba ise ära vahetanud, kui oleks midagi asemele panna Sul muidu neid ka varuks olemas?
Olen siin nüüd Oomika, Lemona ja Serigo läbi kamminud ja ega siin valikut väga polegi.
Originaalis on mul seal STP55NF06L aga seda pole kohapeal kuskilt saada. Ainus variant oleks vist IRLB3034PBF, mis on Lemonas olemas. See on ka RAMPS'i enda dokumentatsioonis soovitatud alternatiiv..
Draiveriks on mul seal A4988.
Arvestades seda, et see alus on ~100W, siis ma olen isegi üllatunud, et need transid seal ilma radikata üldse elus püsivad. TO220 korpus on ju oma olemuselt ikkagi mõeldud radika külge kruvimiseks. Vaadates RAMPS 1.6 (ja isegi 1.5) disaini, siis on näha, et ilmselgelt on sellega ka enne probleeme olnud.
Mõtlengi, et äkki oleks mul mõistlikum see uus üldse plaadi pealt juhtmetega välja tuua ja mingi radika (või lausa raami enda) külge kruvida.
EDIT: Krt, hämmastav ikka. See IRLB3034PBF maksab meil siin ~3,5€. Umbes 7€ eest saaks aga hiinlase käest juba terve 1.6 RAMPS'i
Mul selleks asenduseks juba varem ostetud IRLB8743PbF, kuskilt lugesin ka paremaks alternatiiviks. Kuid siiani pole tekkinud vahetuse vajadust ja seepärast ootavad lihtsalt seda hetke... Aga mul korralik RAMPS jahutus peal, 80mm arvuti vent puhub otse plaadile, kuna lisaks transidele kuumaks lähevad ka kaitsed, driverid jne...
Driverid mul DRV8825 2tk saadaval, neid kiidetakse ka rohkem, kui A4988. Neid saab otse asendada, ainult mikrosteppingu jumperid peab ülekontrollida.
Aga nii see ongi, et Hiinast saab asju palju odavam. Vaata, palju meil RAMPS maksab... Seepärast ongi odavam mõned asjad lihtsalt varuks osta
Sama käib ka laagrite, heatblokide ja muu asjade kohta. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
hmm.. neid draivereid kannatab vist segamini ka kasutada?
Näiteks jätta Z ja ekstruuder A4988 peale ja X/Y upgradeda DRV8825'ks. Peale jumperite peab vist Marlinis ka vastavad muudatused tegema.
Mul on ka üldiselt RAMPS'il jahutus peale puhumas. Tõsi, eilsete ehitustööde käigus ununes see tagasi panna. Võimalik, et see saigi siis saatuslikuks.
Samas päris alguses sai üsna palju ka ilma ventikata prinditud ja polnud häda miskit. Ju siis eile sai mingi valulävi ületatud.
Ilmselt...
Vaatasin ja mul hetkel XYZ pandud DRV8825 ja Extruder A4988. Kui mälu ei peta, siis vaja ainult jumperid sättida, programmis vist oli kõik sama. Aga pead ei anna, uuri järgi. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
warwas, mul on üks Irlb3034pbf üle.
Suutsin endal ka selle sama läbi põletada kui metallist heatbedi installisin. Hetkel on tellitud eraldi relee heatbedi jaoks et nii karm vool rampsist läbi ei käiks.
pwn13, jep. Aluse toidet lülitava väljatransiga (e mosfet'iga) mul see probleem ongi.
mul neid 4 tk kasutuses erinevatel masinatel, pole ühegagi probleemi olnud. Ainuke asi, et jootsin kõik kontaktid enne kasutust üle, kipusid logisema _________________ pWn
Janis, kusjuures relee peale ma hakkasin ka eile õhta mõtlema. Iseasi muidugi kui kaua need kontaktid seal vastu peaksid.
Kaevan korra õhtul oma juppide kastis natuke, äkki leiab miskit sobivat.
maxfox04, viimases Marlinis on draiveri valik täiesti olemas. Vaikimisi on A4988 aga saad ka midagi muud öelda. Arvatavasti ta siis optimeerib kuidagi seda tööd seal.
...
Driverid mul DRV8825 2tk saadaval, neid kiidetakse ka rohkem, kui A4988. ...
Ei maksa kõike juttu kah puhta kullana võtta.
Mul vana hea RAMPS1.4 otsas 8825 toimis aga peale DUE plaadile üleminekut hakkas jama peale. Kipuvad samme vahele jätma.
Igasuguseid asju sai proovitud (ka draiverite moodulite modimist, rääkimata lõputust voolude reguleerimisest) ja lõpuks läksid vanad suurema stepiga draiverid ikkagi tagasi.
Laurman, millised neid Trinamicutest siis kõige asjalikumad on? Neid ju praegusel mitu erinevat varianti - TMC2100, TMC2130, TMC2208. Või on veel mõni?
Ma ka mingi aeg lugesin nende kohta aga kuskilt ei paistnud nagu mingit konsensust. Käis mingi selline risti-rästi kiitmine ja kirumine.
Lisaks veel see, et kas võtta "hiinakad" või originaalid. Osad väitsid, et see hiinlaste valgeks värvitud trükkplaat pidi jahutusele halvasti mõjuma.
...
Driverid mul DRV8825 2tk saadaval, neid kiidetakse ka rohkem, kui A4988. ...
Ei maksa kõike juttu kah puhta kullana võtta.
Mul vana hea RAMPS1.4 otsas 8825 toimis aga peale DUE plaadile üleminekut hakkas jama peale. Kipuvad samme vahele jätma.
Igasuguseid asju sai proovitud (ka draiverite moodulite modimist, rääkimata lõputust voolude reguleerimisest) ja lõpuks läksid vanad suurema stepiga draiverid ikkagi tagasi.
Aga vaata, mis on Arduino Mega ja DUE vahe: Mega-l on 5v toide pinge ja vastavalt ka 5v juhtsignaalid väljundites, DUE-l aga 3.3v toide ja väljundid.
See, et A4988 tööle hakkasid väiksema steppinguga ei tähenda, et DRV8825 halvad olid. Samas ei tasu ka DRV8825 kasutades piirini ajada mikrosteppingut! See ei anna täpsust, aga kaotad võimsuses oluliselt. Ma ei mäleta, mis mikrostepping mul pandud oli, aga kindlasti mitte maksimum.
Oled proovinud sama DRV8825 keskmise mikrosteppinguga?
Miks ma DRV8825 pakkusin? Sest need mul kohapeal olemas ja saan kohe anda. Teisi pole ja tellida daam kasutaja ise ju. _________________ Huvid: mikrokontrollerid, DIY, IoT, CNC, 3D print.
warwas, mina läksin TMC2130 peale üle. Meeldib StealthChop ja sensorless homing. Kui prindi kiiruseid suureks ei aja (alla 100mm/s jääd) siis igati super upgrade. Ma viin omal lisaks kogu elektroonika 24v peale üle, et ka üle 100mm/s kiirustel StealthChopi kasutada saaks.
warwas, mina läksin TMC2130 peale üle. Meeldib StealthChop ja sensorless homing. Kui prindi kiiruseid suureks ei aja (alla 100mm/s jääd) siis igati super upgrade. Ma viin omal lisaks kogu elektroonika 24v peale üle, et ka üle 100mm/s kiirustel StealthChopi kasutada saaks.
hmm.. täitsa huvitav. Sul on hiinakad või originaalid?
Tollest korrast, kui ma ise nende kohta lugesin, siis just mainiti, et see StealthChop on paberil väga lahe aga kui vähegi kiiremalt trükkida tahad, siis jääb hätta. Et sesmõttes pidi see SpreadCycle või siis see hübriid parem olema. Äkki tõesti olid nende probleemid seal hoopis madalast pingest tingitud. Või siis käis see jutt mingi teise Trinamicu kohta.
sa ei või postitada uusi teemasid siia foorumisse sa ei või vastata selle foorumi teemadele sa ei või muuta oma postitusi selles foorumis sa ei või kustutada oma postitusi selles foorumis sa ei või vastata küsitlustele selles foorumis sa ei saa lisada manuseid selles foorumis sa võid manuseid alla laadida selles foorumis
Hinnavaatlus ei vastuta foorumis tehtud postituste eest.